对第一节知识点的补充
一、文件管理
我现在的项目文件管理目录如下:
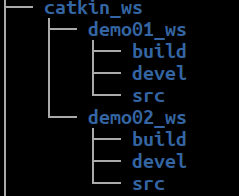
在home目录下新建catkin_ws作为ROS系统的编译总目录,然后在下面新建demo0x_ws文件夹作为子项目的编译目录,我个人认为这样的安排是比较合理的,编码时只需要在对应的子项目下在终端中输入code .打开VSCode即可。

二、vscode的插件使用
当前在vscode中安装的插件有:
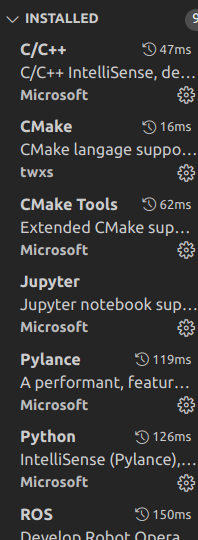
亲测,安装完插件后,通过ROS插件新建Package,可以直接使用快捷键Ctrl+Shift+B调用编译

当然这个快捷编译是有前提的,介绍一下在catkin_ws总目录下新建一个子项目的流程:
1、在catkin_ws下新建一个子文件夹,mkdir -p demo0x_ws/src
2、进入demo0x_ws目录下
3、在终端执行catkin_make
4、在vscode中,右键src目录新建一个package,先输入package的名称,再输入需要的依赖软件包名,需要注意的是,package的名称要求是小写字母、下划线、数字的组合。
然后使用快捷键调用编译,你就会发现,出现了catkin_make的选项。
三、在vscode中使用搜狗输入法的问题
问题:在vscode中不能使用搜狗输入法,在系统其他环境中则正常
解决方法:从 Ubuntu Software Apps 安装的是 snap 软件包,也就是非 vscode 官方编译发布的安装包,有这个输入法bug,在VSCode 官网下载重新安装即可。
四、原教程2.1.2中代码的修改
教程中的代码有一点小小的问题,发布的数字会比接收到的小1,经过下面的修改,即可解决。
把上面的代码修改为下面的,其实就是把显示数据的代码rospy.loginfo的顺序修改一下